MPU6050 Class Reference
Class that manage the MPU6050 3-axes accelerometer/gyrometer. More...
#include <mpu6050.h>
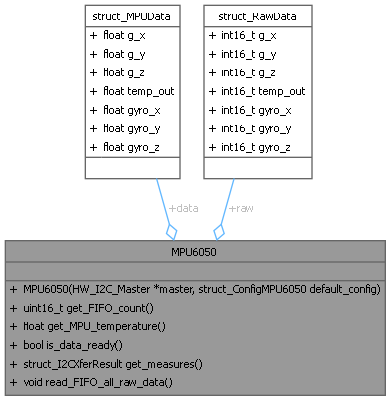
Collaboration diagram for MPU6050:
Public Member Functions | |
| MPU6050 (HW_I2C_Master *master, struct_ConfigMPU6050 default_config) | |
| Construct a new MPU6050 object. | |
| uint16_t | get_FIFO_count () |
| Get the FIFO count object. | |
| float | get_MPU_temperature () |
| Get the MPU temperature object. | |
| bool | is_data_ready () |
| the flag that indicates if sensors data are ready | |
| struct_I2CXferResult | get_measures () |
| Get the raw data, fill the internal struct_RawData, converts raw data to real measures according to offset and coversion factor. | |
| void | read_FIFO_all_raw_data () |
| read raw data from FIFO | |
Public Attributes | |
| struct_MPUData | data |
| the set of measures from sensors | |
| struct_RawData | raw |
| the set of raw data from sensors | |
Private Member Functions | |
| void | init_mpu () |
| initialise the MPU configuration | |
| struct_I2CXferResult | read_registers_all_raw_data () |
| fill the internal data with raw values from sensors | |
| void | calibrate () |
| start the calibration of the MPU and compute gyro and accellero offset and conversion factor | |
| void | convert_raw_to_measure () |
| fill the internal measures by converting the raw data | |
| void | read_FIFO_g_accel_raw_data () |
| read raw acceleration and gyrometer data from FIFO | |
| void | read_FIFO_accel_raw_data () |
| read raw acceleration data from FIFO | |
Private Attributes | |
| HW_I2C_Master * | master |
| the I2C master that control the MPU6050 device | |
| struct_ConfigMPU6050 | device_config |
| the MPU6050 configuration | |
| float | acceleration_factor {} |
| the accelerator proportional factor computed according to the device configuration | |
| float | gyro_factor {} |
| the gyrometer proportional factor computed according to the device configuration | |
| float | temperature_gain = 1.0 / 340.0 |
| the proportional factor for the temperature | |
| float | temperature_offset = 36.53 |
| the temperature offset | |
| float | accel_x_offset {} |
| the x-acceleration offset | |
| float | accel_y_offset {} |
| the y-acceleration offset | |
| float | accel_z_offset {} |
| the z-acceleration offset | |
| float | gyro_x_offset {} |
| the x-gyrometer offset | |
| float | gyro_y_offset {} |
| the y-gyrometer offset | |
| float | gyro_z_offset {} |
| the z-gyrometer offset | |
Detailed Description
Class that manage the MPU6050 3-axes accelerometer/gyrometer.
- Note
- I2C signals are very sensitive. May not work properly when wiring is not clean
Constructor & Destructor Documentation
◆ MPU6050()
| MPU6050::MPU6050 | ( | HW_I2C_Master * | master, |
| struct_ConfigMPU6050 | default_config ) |
Construct a new MPU6050 object.
- Parameters
-
master The associated I2C bus master default_config the default config according to struct_ConfigMPU6050
Here is the call graph for this function:

Member Function Documentation
◆ get_FIFO_count()
| uint16_t MPU6050::get_FIFO_count | ( | ) |
Get the FIFO count object.
- Returns
- uint16_t
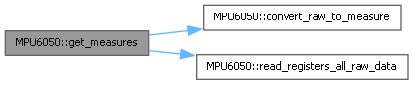
◆ get_measures()
| struct_I2CXferResult MPU6050::get_measures | ( | ) |
Get the raw data, fill the internal struct_RawData, converts raw data to real measures according to offset and coversion factor.
- Returns
- struct_MPUData
Here is the call graph for this function:
◆ get_MPU_temperature()
| float MPU6050::get_MPU_temperature | ( | ) |
Get the MPU temperature object.
- Returns
- float
◆ is_data_ready()
| bool MPU6050::is_data_ready | ( | ) |
the flag that indicates if sensors data are ready
- Returns
- true
- false
Here is the caller graph for this function:

◆ read_FIFO_all_raw_data()
| void MPU6050::read_FIFO_all_raw_data | ( | ) |
read raw data from FIFO
- Bug
- //FIXME : check FIFO data reading.... seems not working well
◆ read_registers_all_raw_data()
|
private |
fill the internal data with raw values from sensors
- Returns
- struct_I2CXferResult The result of the i2c reading
Here is the caller graph for this function:

The documentation for this class was generated from the following files:
- mpu6050.h
- mpu6050.cpp